Master Thesis: Gas Sensors 22. November 202122. November 2021 For more information, visit: https://nano-tud.de/mthesis/6
Bachelorarbeit: Entwurf und Implementierung eines haptischen Rückgabeverfahrens zur Unterstüzung immersiver Robotersteuerungen 21. September 202013. October 2020 Roboter spielen von Jahr zu Jahr eine immer größer werdende Rolle im Leben der Menschen. Sie werden zum Reinigen von Fenstern und Böden, zur Produktion in der Industrie und zum Erkunden neuer Planeten genutzt. Die Stärke von Robotern liegt in der repetitiven Ausführung vorgefertigter Aufgaben. Roboter sind dabei in der Lage, schneller, präziser und kostengünstiger als Menschen zu arbeiten. Bei Arbeiten mit dynamisch wechselnden Bedingungen sind Menschen hingegen weiterhin oft im Vorteil, da sie im Gegensatz zu Robotern anpassungsfähiger arbeiten können… Noah Kaspereit
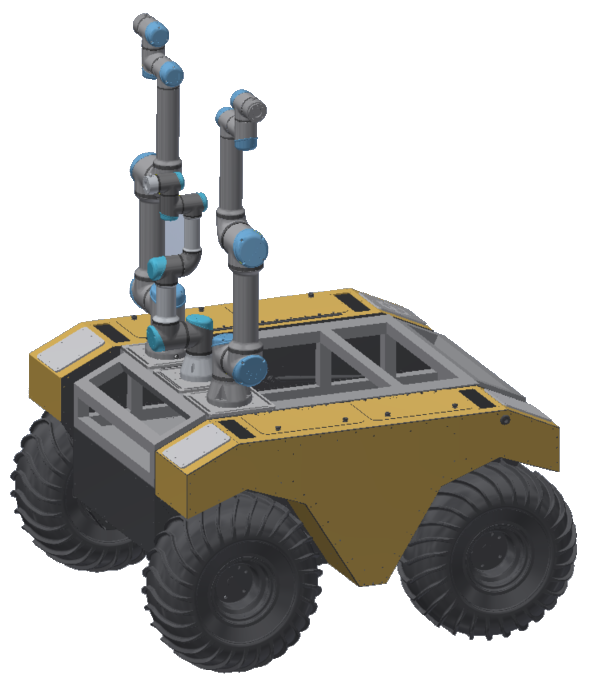
Search for SHK / WHK 13. May 202027. May 2020 Where: Chair of Software Technologiethere are tasks for HomeOfficeas soon as possible in SNIFFBOT lab Start / end: immediately / end of project Dec. 2021 What: Immersion control of robots Tasks: Programming on robot arms and grippers (UR5, Robotiq), robot platform (CPR Warthog), VR glasses (HTC and Oculus), haptic hardware (SenseGlove, HaptiGuard)Features: ROS / Simulation / Unity / MDSD / Petri nets Contact: Mikhail Belov mikhail.belov@tu-dresden.de
Bachelorarbeit: Systematische Literaturanalyse zum Thema Immersionsteuerung von Robotern 8. March 20208. May 2020 Roboter haben sich als zuverlässige, autonome Hilfsmittel in vorde nierten Umgebungen zur Bewältigung von repetitiven Aufgaben, wie dem industriellen Zusammenbau von Einzelteilen, erwiesen. Obwohl sie mit übermenschlichen Sensoren und Aktuatoren versehen sind, mangelt es ihnen jedoch an kognitiven Fähigkeiten, konsolidierte Sensordaten zu interpretieren und exible und dynamische Aktionen im Rahmen einer komplexen Aufgabe auszuführen. In einer Fernsteuerung eines Roboters durch einen Menschen kann somit die Intelligenz und Kreativitäteines menschlichen Operators zur Erfüllung von Aufgaben eingesetzt und gleichzeitig die mechanischen Fähigkeiten eines Roboters ausgenutzt werden…Thanh-Tien Tenh Cong