Landeshauptstadt Dresden
Landeshauptstadt Dresden
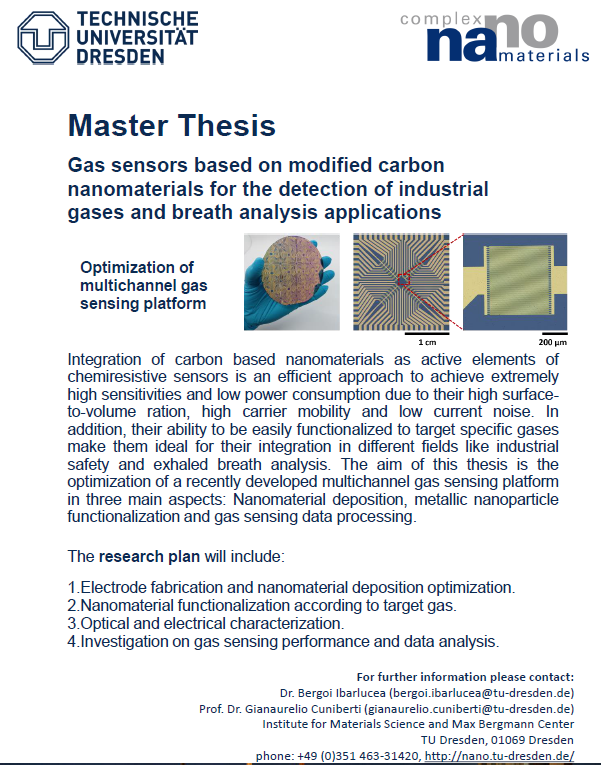
For more information, visit: https://nano-tud.de/mthesis/6
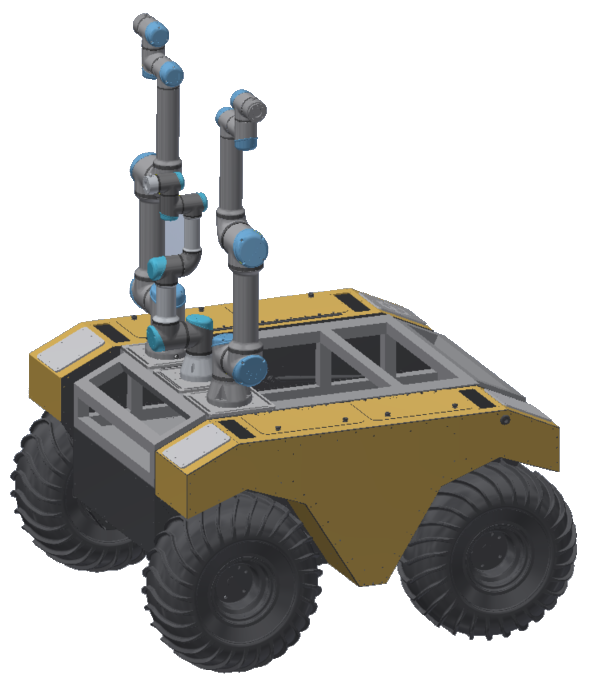
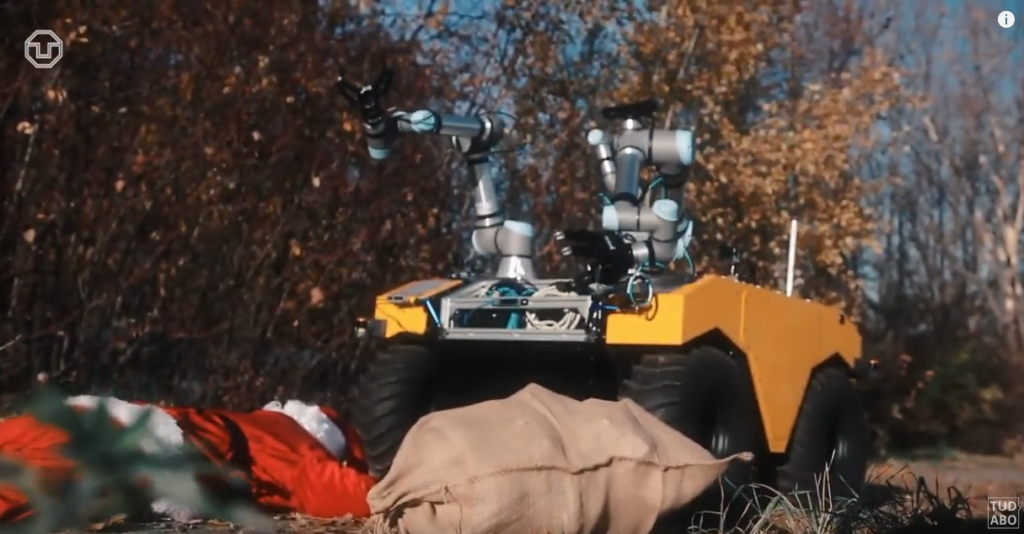
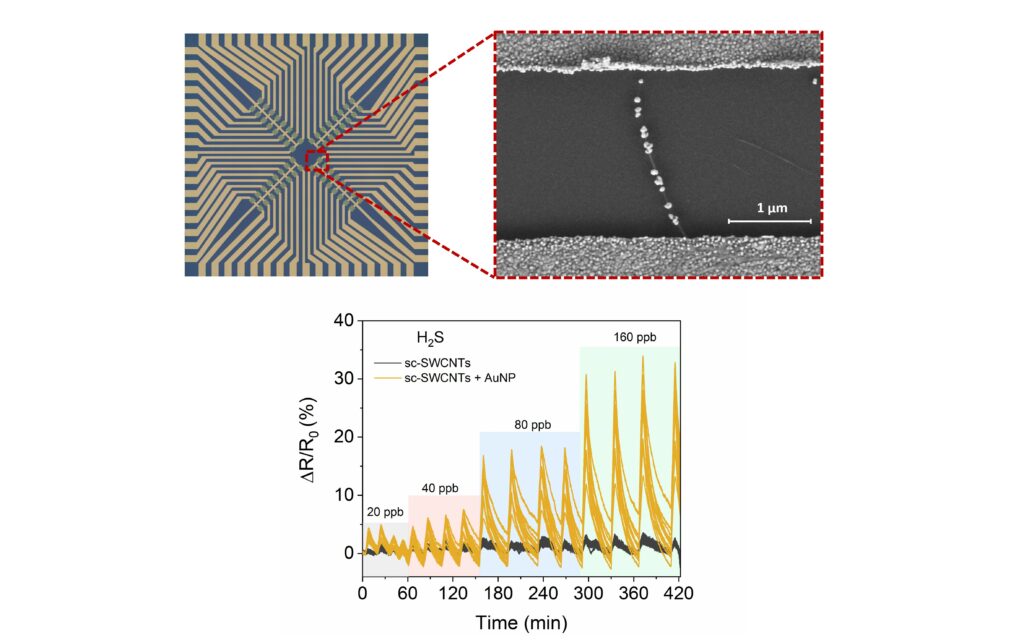
The gas sensors developed by Prof. Gianaurelio Cuniberti’s team for the Sniffbot project achieve the necessary sensitivity to sniff H2S gas at breath levels in humid air. The work has been published in the journal Nano Research.

TU Dresden
Sikicon Saxany, https://www.silicon-saxony.de